A lire
Qui sommes-nous? Conditions Générales d'Utilisation Mentions Légales Pourquoi utiliser un QCM ?A savoir
Foire Aux Questions Création d'un Compte Compte ECOLEDivers
Quel diplôme pour mon activité de télépilote ? OPEN A2 en France Le CATS en FranceConnaissances générales en matière d'UAS
1. Introduction :
Pour les différents Brevet de Télépilote Européens, les notions techniques sont peu abordées, il est d'abord demandé aux candidats de maitriser la notion de risque de l'activité et de la protection des tiers.
Toutefois, un certain nombre de questions portent sur de nécessaires connaissances techniques, vous les trouverez résumées dans ce cours.
2. Notions de base de mécanique du vol :
2.1 Les forces aérodynamiques :
Une aile et une pale d'hélice ont une section transversale similaire : en principe, une pale est une petite aile. La section transversale d'un profil d'aile présente généralement un bord avant arrondi et qui se rétrécit vers l'arrière.
Sur cette voilure (ou pale d'hélice) le flux d'air va créer quatre forces qui agissent dans quatre directions différentes :
La portance tire l'aile vers le haut.
Le poids s'y oppose vers le bas.
La poussée est nécessaire pour générer un flux d'air.
La traînée s'oppose à ce mouvement vers l'avant.
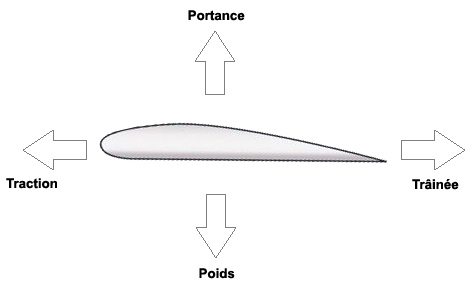
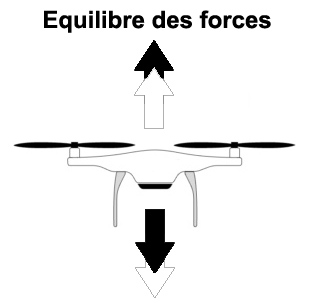
Dans un vol stable et en palier, toutes les forces agissant sur l'aile sont en équilibre, de sorte qu'aucune force résultante ne subsiste. L'absence de force résultante signifie que l'aéronef (ou la pale d'hélice) ne devient pas plus rapide ou plus lent, ni ne monte ou ne descend.
Si cet équilibre est intentionnellement ou involontairement perturbé, votre drone monte ou descend, devient plus rapide ou plus lent.
2.2 La portance :
La forme typique d'une aile est de maintenir un équilibre optimal entre la portance et la traînée et de permettre de générer de la portance sur une large plage de vitesses. Cet objectif peut être atteint en 'inclinant' légèrement une surface vers le flux d'air, ce qui fait varier la pression entre le haut et le bas de la voilure.
Cet angle entre la corde de l'aile et la direction du flux d'air s'appelle l'angle d'incidence.
On peut également ressentir cet effet en voiture, en sortant la main à plat par la fenêtre, de sorte que le pouce soit dirigé dans le sens de la marche, ce qui signifie que le flux d'air frappe directement le bord de la main. Le flux d'air sur la partie supérieure et inférieure de la main est similaire : aucune portance n'est générée.
Cependant, si la main est inclinée de manière à ce que le pouce soit dirigé vers le haut, vous pouvez immédiatement sentir comment la main est aspirée vers le haut. L'angle d'incidence a été augmenté, ce qui entraîne des flux d'air différents autour des côtés supérieurs et inférieurs de la main : la portance est créée.
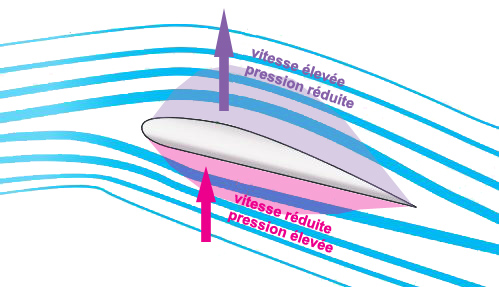
En augmentant l'angle d'incidence d'une aile, l'air qui passe sur le dessus (l'extrados) est accéléré, ce qui fait diminuer la pression. Sous l'aile (l'intrados), l'air 'appuie' un peu contre la surface, ce qui engendre une surpression. Il en résulte une force sur l'ensemble de l'aile qui la 'tire' vers le haut, c'est la portance.
En plus de l'angle d'incidence, la vitesse de l'écoulement de l'air joue un rôle sur la force de la portance : plus l'aile (ou la pale d'hélice) se déplace rapidement dans l'air, plus la portance est forte. Dans le cas d'un drone équipé d'hélices, la portance augmente d'autant plus que la vitesse de rotation des hélices est élevée.
2.3 Axes et sens de déplacement :
Les aéronefs peuvent se déplacer autour des trois axes suivants dans les trois directions de l'espace :
- L'axe longitudinal traverse l'aéronef dans le sens de la longueur ; les mouvements autour de l'axe longitudinal sont appelés 'roulis' et le type de contrôle est appelé 'contrôle latéral'.
- L'axe latéral est transversal à la direction du vol : sur un drone de type 'avion' ou 'planeur', il passe au travers des ailes ; les mouvements autour de l'axe latéral sont appelés 'tangage' et le type de contrôle est appelé 'contrôle longitudinal'.
- L'axe vertical s'étend verticalement de haut en bas à travers le drone ; les mouvements autour de l'axe vertical sont appelés lacet et le type de contrôle est appelé ' contrôle directionnel '.
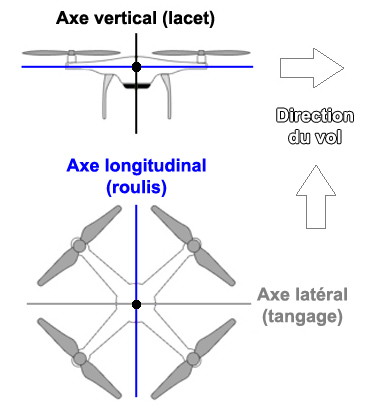
Tous ces axes sont perpendiculaires les uns aux autres. Dans le cas des drones multirotors, qui ont généralement une structure symétrique, la direction avant est souvent indiquée (colorée) afin que les directions de mouvement puissent être clairement identifiées.
Les mouvements des drones multirotors sont mis en oeuvre en faisant varier la vitesse de l'hélice. L'élévateur, le gouvernail et les ailerons sont utilisés par les drones avec des ailes de type 'avion' ou 'planeur'.
Sur un drone de type 'hélicoptère', c'est aussi le rotor anti-couple qui permettra de contrôler la rotation de la cellule sur l'axe de lacet. Le basculement du rotor d'avant en arrière permettra le contrôle en tangage.
2.4 Mouvements du drone :
Un drone multirotor ou hélicoptère a trois directions de mouvement :
- vers le haut et le bas
- en rotation autour de son propre axe
- en latéral, avant et arrière.
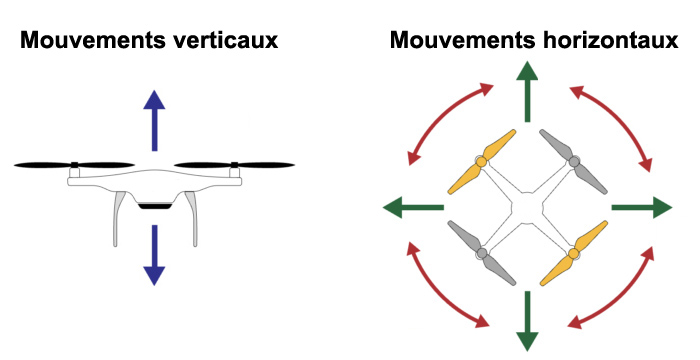
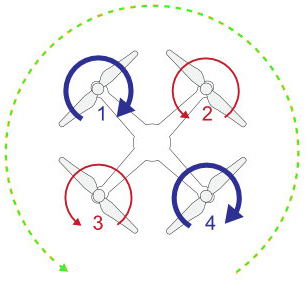
Les hélices d'un drone multirotors ne tournent pas toutes dans le même sens. En règle générale, les hélices opposées tournent dans le même sens, les hélices directement voisines dans le sens opposé. Cela permet d'éviter toute rotation indésirable autour de l'axe du drone.
Pour décoller avec un drone, la résultante des forces en présence doit avoir pour résultat une force ascendante générée par toutes les hélices, plus forte que que la force gravitationnelle. Ceci est obtenu en faisant tourner les hélices plus rapidement.
Une fois que l'altitude de vol souhaitée a été atteinte, la vitesse des hélices est réduite jusqu'à ce qu'il y ait un équilibre entre la portance et le poids.
Pour redescendre, la portance générée par les hélices doit être légèrement inférieure à la gravité.
Pour tourner autour de son axe, la force totale d'une paire d'hélices opposées doit être supérieure à celle de l'autre paire.
Un exemple : si les hélices 1 et 4 tournent plus vite que les 2 et 3, le drone tourne dans le sens des aiguilles d'une montre autour de son axe. Ceci peut être réalisé en augmentant la force sur les hélices 1 et 4 ou en la réduisant sur les hélices 2 et 3.
Cependant, si seule la force sur les hélices 1 et 4 est augmentée, le drone va monter en raison de l'augmentation de la portance. Pour éviter cela, la vitesse des hélices 2 et 3 doit être réduite en même temps.
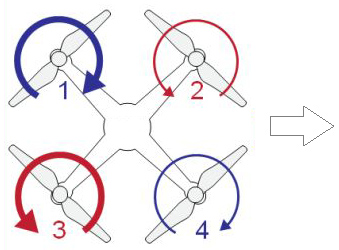
Dire qu'un drone se déplace vers l'avant, vers l'arrière ou latéralement est souvent une question d'orientation et de point de vue de son pilote, puisque chaque côté peut être à l'avant ou à l'arrière. En règle générale, c'est le télépilote qui fixe sa propre perspective.
Dans l'exemple ci-dessous, si la force sur les hélices 1 et 3 est augmentée à droite et que la force sur les hélices 2 et 4 est réduite, le drone se déplace alors vers la droite.
3. Les composants principaux d'un UAS :
Moteurs et contrôleurs (ESC) :
Sur un drone de type 'multirotor', les moteurs assurent à la fois la sustentation et le déplacement d'un drone. Leur rôle est donc critique et d'eux dépendent la sécurité du drone.
Sur un drone de type 'avion' le risque est diminué mais reste bien présent car la capacité à planer est parfois très limitée.
Sur un drone de type 'hélicoptère', la panne peut être critique s'il s'agit de l'entrainement du rotor anti-couple, si c'est l'entrainement du rotor principale qui est touché, il est possible de le poser en 'auto-rotation', mais cette manoeuvre demeure tout de même délicate.
Les moteurs sont généralement de type brushless (sans contact) : leur rotation est provoquée par l'alimentation séquentielle d'électro-aimants fixes qui vont attirer chacun à leur tour les aimants mobiles en rotation du moteur. Le pilotage de l'alimentation des aimants est une fonction critique pour garantir le bon fonctionnement des moteurs. Cette fonction est assurée par l'ESC (Electronic Speed Controller), on en trouve un par moteur.
L'ESC assure le pilotage de l'alimentation des moteurs pour garantir un fonctionnement souple et conforme aux ordres du télépilote et/ou du pilote automatique (fonction de stabilisation). Associé à l'ESC, le contrôleur de vol assure l'intégration de toutes les données de l'environnement du drone afin d'élaborer ses ordres de commandes aux ESC, permettant la stabilité en continue du vol et la conversion des ordres du télépilote aux ESC.
Hélices :
Les hélices ont toujours un sens de rotation, horaire (CW) ou anti-horaire (CCW). Vous devez respecter ce sens en montant une hélice sur un moteur, s'il tourne en sens horaire, vous mettrez une hélice prévue pour tourner en sens horaire.
Comme les ailes d'avions, le dessous de la pale s'appelle l'intrados, le dessus l'extrados, l'avant le bord d'attaque (il affronte le vent relatif!) et la partie arrière le bord de fuite.
Les hélices présentent généralement deux valeurs :
- la longueur des pales (le diamètre)
- le pas géométrique des pales
Ces deux valeurs sont exprimés en pouces.
1 pouce = 2,54 cm.
Système de pilotage :
La télécommande permet au pilote de contrôler la trajectoire du drone. La liaison avec le drone est assurée à travers des protocoles de communication sur des gammes de fréquences dédiées et autorisées.
Généralement, les informations de commande de la trajectoire sont transmises sur la fréquence de 2,4 GHz. Cette fréquence est commune avec celles utilisées pour le Wi-Fi. C'est pourquoi des interférences entre la télécommande et le drone peuvent exister lors de vol en zones urbaines et/ou peuplées.
Au cours du vol, le télépilote doit vérifier que le signal est suffisamment fort et que le drone est en portée de réception pour en conserver le contrôle. La force et la qualité du signal sont en général indiquées sur la télécommande.
La télécommande permet le pilotage en mode manuel, automatique ou autonome :
- un drone évolue sous contrôle 'manuel' lorsque sa trajectoire résulte à tout instant de commandes d'un télépilote transmises en temps réel.
- un drone évolue de manière 'automatique' lorsque son évolution en vol a été programmée avant ou pendant le vol et que le vol s'effectue sans intervention d'un télépilote.
- un drone évolue de manière 'autonome' lorsqu'il évolue de manière automatique et qu'aucun télépilote n'est en mesure d'intervenir sur sa trajectoire.
Batteries :
A l'examen, les questions ne portent que sur les batteries LiPo (Lithium Polymère). Connu pour sa faible masse et son énergie massique élevée, le lithium est un métal dont les propriétés chimiques permettent d'accumuler puis de restituer de l'énergie électrique.
En raison de la grande réactivité du lithium, notamment à l'eau, l'air, l'oxygène ou l'azote, il est important de prendre quelques précautions lors de l'emploi de batterie LiPo dans nos drones.
Une batterie se compose de plusieurs éléments (cellules) connectés le plus souvent en série.
Pour l'examen on retiendra qu'un élément de batterie a une tension de 3,7 Volt.
Il existe différentes compositions de batteries, avec des éléments montés (branchés/connectés) en série et/ou en parallèle, il faut retenir que :
En montage en série, les Volts s'ajoutent.
En montage en parallèle, les Ampères s'ajoutent.
Par exemple, pour une batterie LiPo 3S de 5200 mAh, nous avons 3 éléments montés en Série, nous aurons donc une tension de 3 x 3,7 V = 11,1 Volt.
Pour cette même batterie, il est possible de calculer sa puissance :
Puissance = Volts x Ampères
11,1 x 5,2 Ah = 57,7 W.
La capacité d'une batterie est donnée en Ampères.heures
La capacité est égale aux Watts divisés par le voltage, par exemple pour une batterie de 15 V et d'une puissance de 75 W, elle aura une capacité de :
75 / 15 = 5 Ah.
Il ne faut pas confondre avec la lettre C que l'on retrouve sur les batterie, associée avec un chiffe (35, 45, etc...) qui correspond à la capacité maximale de décharge continue de la batterie (le taux de recharge/décharge).
Pour une batterie ayant les caractéristiques suivantes :
4S LiPo de 5000 mAh 35 C.
35C indique que la batterie peut être déchargée à une puissance équivalente à 35 fois la capacité en Ampère de la batterie, et ce de façon continue.
35C correspond donc à un taux de décharge de : 35 x 5 A = 175 A.
A la fin de votre mission de télépilotage, retirez et inspectez les batteries pour vérifier qu'elles n'ont pas gonflé et sont en bon état, si votre batterie est gonflée, elle présente un danger et ne doit être ni rechargée ni utilisée.
Pour prolonger leur durée de vie, stockez les chargées à environ 50% de leur capacité. Afin d'éviter tout risque d'incendie, ne les laissez pas dans votre drone et stockez les dans un endroit propre, à l'abri du soleil ou d'une source de chaleur et à température modérée (15 à 25° par exemple).
Les gyroscopes
Le gyroscope est un instrument indispensable pour donner la position ou le mouvement du drone. Son but est de donner une référence de verticale à partir de laquelle on pourra définir l'horizon, et donc l'inclinaison (l'attitude) du drone.Les gyroscopes généralement utilisés dans les drones pour mesurer les variations d'assiette (tangage, roulis, lacet) sont de typespiézo-électriques.
Les propriétés d'un gyroscope sont la fixité dans l'espace, la précession et le couple gyroscopique.
Les accéléromètres
Les accéléromètres dans un drone mesurent des accélérations linéaires. A partir de leurs mesures, il sera possible de connaître la distance parcourue grâce à l'intégration du temps par exemple. Les accéléromètres vont permettre l'asservissement du drone (stabilisation, variation d'assiette, altitude et guidage) en envoyant des informations d'accélérations à l'électronique embarquée.
Les IMU
Une Unité de Mesure d'Inertie (IMU) aussi appelée 'centrale inertielle' contient des accéléromètres et des gyroscopes. Une IMU est positionnée avec un repère de référence sur le drone, lui indiquant par exemple où se situe l'avant de l'appareil, définissant ainsi les axes de l'aéronef (axe de roulis, axe de tangage et axe de lacet). Les accélérations longitudinales, latérales, normales/verticales seront mesurées par rapport à ces axes.
Les baromètres
Le baromètre mesure une pression atmosphérique (la pressionsstatique). De cette pression, le système nous indiquera l'altitude de vol (la distance verticale par rapport à la mer) ou la hauteur (la distance verticale par rapport au sol) suivant le calage de référence que l'on aura choisi dans les paramètres de transmission. Il existe plusieurs type de baromètre, et il faut noter que pour le baromètre piézoélectrique installé dans un drone, celui-ci indiquera seulement la hauteur de vol (sa référence étant la pression au point de décollage, il vous donnera une distance par rapport au sol, c'est à dire une hauteur).
Un système de maintien d'altitude utilise le baromètre à minima, et souvent associé à un capteur à ultrasons qui permet une réaction plus rapide par rapport au baromètre pour maintenir précisément l'altitude souhaitée.
Le baromètre classique se compose d'un capteur de pression(généralement une capsule anéroïde) qui se déforme à mesure des changements (baisse ou augmentation) de la pression atmosphérique statique.
Les compas (boussole)
Le compas d'un drone a pour but de fournir une référence de Nord magnétique. Le compas magnétique est un aimant, il peut donc être facilement perturbé, comme par exemple par une masse métallique ferreuse ou/et d'autres champs électriquesà proximité.
Notez également que des vols à proximité des pôles magnétiques terrestres seraient susceptibles d'entraîner une lecture erronée en raison d'une forte composante verticale du champ magnétique terrestre : l'aiguille du compas se retrouverait bloquée sur son pivot.
Il conviendra de réaliser une procédure de calibrage précisé avant chaque vol, en se tenant à l'écart de toutes sources magnétiques ou ferreuses.