18 membres en ligne en ce moment. Rejoignez-les pour consulter nos 1450 questions (24 mises à jour il y a 6 jours)
Question 85-1 : Laquelle des réponses suivantes est correcte en ce qui concerne la hauteur et la température dans la thermosphère dans la thermosphère ? [ Connaissances AESA ]
La température augmente avec l'altitude
Question 85-2 : Laquelle des réponses suivantes est correcte en ce qui concerne l'altitude et la température dans la troposphère dans la troposphère ?
La température diminue lorsque l'altitude augmente.
195pplle tracé jaune indique l'évolution de la température en fonction de l'altitude dans la troposphère la température diminue lorsque l'altitude augmente jusqu'à la tropopause La température augmente avec l'altitude. la température est la même partout. la température augmente d'abord avec l'altitude, puis diminue.
Question 85-3 : Qu'est ce que la turbulence ?
Création de turbulences par la collision de courants d'air.
L'air chaud s'élève dans l'atmosphère pensez aux montgolfières les courants ascendants génèrent alors de l'instabilité conduisant à de la turbulence en ce mélangeant avec l'air plus froidce n'est pas la turbulence qui génère de l'air chaudil est vrai que cette question parait étrange mais elle est bien formulée comme cela à l'examenGénération d'air chaud par la collision des courants d'air. apparition de la stagnation du vent due à la collision des courants d'air. création d'air froid par la collision de courants d'air.
Question 85-4 : Comment se forme un nuage ?
Un nuage se forme par le refroidissement de l'air ascendant et l'augmentation de l'humidité relative.
Les nuages se forment par refroidissement de l'air ascendant lorsque la température diminue la quantité maximale de vapeur d'eau que peut contenir l'air diminue donc l'humidité relative augmente lorsque l'humidité relative atteint 100% la condensation apparaît autour de minuscules particules solidesUn nuage se forme lorsque l'air ascendant se réchauffe, ce qui augmente son humidité relative. un nuage se forme lorsque l'air ascendant se refroidit et que l'humidité relative diminue en conséquence. un nuage se forme lorsque l'air ascendant qui se réchauffe et dont l'humidité relative diminue en conséquence.
Question 85-5 : Dans quelle unité la vitesse du vent est elle exprimée en standard dans l'aviation ?
Noeuds.
Pieds par minute. mètres par seconde. kilomètres par heure.
Question 85-6 : Quelle réponse concernant les isobares et le vent est correcte ?
Les isobares proches les unes des autres reflètent un vent fort.
Une isobare est une ligne sur un graphe ou une carte reliant les points d'égale pressionces lignes permettent de délimiter les dépressions anticyclones creux et crêtes barométriques sur les cartes météorologiques 304pplon note que plus les lignes isobares sont serrées plus la force du vent est grandeLes isobares proches les unes des autres reflètent un vent léger. les isobares n'ont aucun rapport avec le vent. les isobares qui sont proches les unes des autres montrent un cisaillement du vent.
Question 85-7 : Quand parle t on de brouillard ?
Lorsque la visibilité horizontale est inférieure à 1000 mètres.
En météorologie on parle de brume lorsque la visibilité horizontale est comprise entre 1 et 5 kilomètresen dessous de 1 km on parle de brouillardLorsque la visibilité verticale est inférieure à 1000 mètres. lorsque la visibilité horizontale est inférieure à 5000 mètres. lorsque la visibilité est supérieure à 500 mètres, mais inférieure à 1000 mètres.
Question 85-8 : Laquelle des réponses suivantes est correcte le vent est un phénomène ?
Météorologique.
Chimique. thermique. géomagnétique.
Question 85-9 : De quel type de nuages provient une rafale descendante ?
Le cumulonimbus.
172ulmle cumulonimbus est un genre de nuage d'extension verticale considérable aux latitudes tempérées sa base se situe entre 300 et 3000 m de hauteur avec une épaisseur allant de 5000 à 12000 m mais aux latitudes tropicales il peut atteindre et dépasser 17000 m d'altitudeson apparence est ample et massive semblable à celle d'une montagne 769pplles cumulonimbus cb se développent lors de situation à forte instabilité verticale on y rencontre dans et à proximité du cisaillement on parle de cisaillement lors d'une brusque variation spatiale très marquée de direction ou de vitesse du vent sur une échelle réduite générant de la turbulence forte et très locale les conséquences sont une modification brutale de la trajectoire de l'aéronef du givrage les nuages convectifs ont un fort potentiel givrant une réduction de visibilité averses de forte voire très forte intensité de pluie de grêle de grésil sont des éléments réduisant considérablement la visibilité il ne s'agit pas de brouillard de la foudre associée aux cb et aux orages on en connaît 3 types foudroiement intra nuage foudroiement inter nuages et foudroiement nuage sol le plus sévère la grêle phénomène moins fréquent mais très dangereuxle vol en présence de cumulonimbus est possible lorsque les cumulonimbus sont isolés et en les contournant à une distance suffisante pour information la turbulence peut encore être forte à plus de 25 nm d'un cb le cumulonimbus fait partie intégralement du front d'orageLe stratus. le cumulus. le cirrus.
Question 85-10 : Quel est le nuage le plus dangereux pour l'aviation ?
Le cumulonimbus.
172ulmle cumulonimbus est un genre de nuage d'extension verticale considérable aux latitudes tempérées sa base se situe entre 300 et 3000 m de hauteur avec une épaisseur allant de 5000 à 12000 m mais aux latitudes tropicales il peut atteindre et dépasser 17000 m d'altitudeson apparence est ample et massive semblable à celle d'une montagne 769pplles cumulonimbus cb se développent lors de situation à forte instabilité verticale on y rencontre dans et à proximité du cisaillement on parle de cisaillement lors d'une brusque variation spatiale très marquée de direction ou de vitesse du vent sur une échelle réduite générant de la turbulence forte et très locale les conséquences sont une modification brutale de la trajectoire de l'aéronef du givrage les nuages convectifs ont un fort potentiel givrant une réduction de visibilité averses de forte voire très forte intensité de pluie de grêle de grésil sont des éléments réduisant considérablement la visibilité il ne s'agit pas de brouillard de la foudre associée aux cb et aux orages on en connaît 3 types foudroiement intra nuage foudroiement inter nuages et foudroiement nuage sol le plus sévère la grêle phénomène moins fréquent mais très dangereuxle vol en présence de cumulonimbus est possible lorsque les cumulonimbus sont isolés et en les contournant à une distance suffisante pour information la turbulence peut encore être forte à plus de 25 nm d'un cb le cumulonimbus fait partie intégralement du front d'orageLe stratus. le cumulus. le cirrus.
Question 85-11 : Dans quelle couche de l'atmosphère les vols ont ils lieu dans la catégorie open ouverte ?
Troposphère.
195pplprenez quelques instants pour méditer sur l'intérêt de cette question pour notre activitéles rédacteurs pourraient se creuser un peu la tête pour faire des questions un peu plus intéressantes qui apporteraient une plus value pour la sécurité du vol mais visiblement ce n'est pas le casThermosphère. stratosphère. mésosphère.
Question 85-12 : Les pilotes doivent toujours s'informer sur les conditions météorologiques les plus récentes du lieu où ils se trouvent pourquoi est ce important ?
Certaines conditions météorologiques peuvent présenter un danger pour le vol.
Savoir s'il faut apporter des vêtements de pluie. cela permettra d'éviter les collisions avec d'autres aéronefs. la capacité de concentration peut être affectée par les conditions météorologiques.
Question 85-13 : Dans l'hémisphère nord le vent dans une zone de basse pression tourne dans le sens ?
Inverse des aiguilles d'une montre.
Si la terre était immobile le vent se dirigerait directement des hautes pressions vers les basses pressions mais du fait de la rotation de la terre les mouvements de l'air sont déviées vers la droite dans l'hémisphère nord et vers la gauche dans l'hémisphère sud dans l'hémisphère nord le vent tourne dans le sens des aiguilles d'une montre autour des anticyclones hautes pressions et en sens inverse autour des dépressions basses pressions 148ppl attention voici l'intitulé officiel mais il est tellement mal tourné que je l'ai modifié intitulé quelle est la bonne réponse dans l'hémisphère nord réponse juste le vent dans une zone de basse pression tourne t il dans le sens inverse des aiguilles d'une montre le rédacteur a fait des réponses questions je pense qu'il a utilisé une ia pour générer des qcm sans relire quoique ce soitContraire des aiguilles uniquement en hiver. contraire des aiguilles d'une montre uniquement en été. des aiguilles d'une montre dans une zone de basse pression.
Question 85-14 : Dans l'hémisphère nord le vent dans une zone de haute pression tourne dans le sens ?
Des aiguilles d'une montre.
Si la terre était immobile le vent se dirigerait directement des hautes pressions vers les basses pressions mais du fait de la rotation de la terre les mouvements de l'air sont déviées vers la droite dans l'hémisphère nord et vers la gauche dans l'hémisphère sud dans l'hémisphère nord le vent tourne dans le sens des aiguilles d'une montre autour des anticyclones hautes pressions et en sens inverse autour des dépressions basses pressions 148ppl attention voici l'intitulé officiel mais il est tellement mal tourné que je l'ai modifié intitulé quelle est la bonne réponse dans l'hémisphère nord réponse juste le vent tourne t il dans le sens des aiguilles d'une montre dans une zone de haute pression le rédacteur a fait des réponses questions je pense qu'il a utilisé une ia pour générer des qcm sans relire quoique ce soitInverse des aiguilles d'une montre. contraire des aiguilles d'une montre en hiver. contraire des aiguilles d'une montre en été.
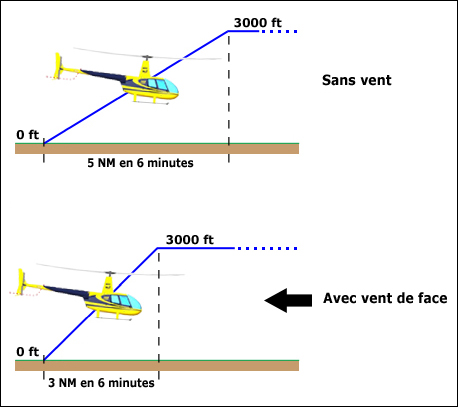
Question 85-15 : à 100m de hauteur comment varie le vent ?
50% plus fort.
La force du vent en altitude augmentedès que l'on sort de la couche de frottement la couche d'air au contact du sol qui fait environ 50 à 60m de hauteur sur un sol sans trop de relief on retient une augmentation de 50% de la vitesse du ventvoici les valeurs à connaitre pour l'examen sur la terre la vitesse du vent dans la couche de frottement diminue d'approximativement 50% le vent dans la couche de frottement souffle au travers des isobares vers les basses pressions l'angle entre la direction du vent et les isobares change d'approximativement 30°sur la mer la vitesse du vent dans la couche de frottement diminue d'approximativement 30% le vent dans la couche de frottement souffle au travers des isobares vers les basses pressions l'angle entre la direction du vent et les isobares change d'approximativement 10°100% plus fort. 50% plus faible. 100% plus faible.
Question 85-16 : Durant un vol assisté du mode gps avec un aéronef télépiloté de type multirotor la méthode la plus adaptée pour contrer un gradient de vent trop important est ?
De diminuer la hauteur de vol.
Question 85-17 : Vous faites évoluer votre uas proche du sol quelle situation peut gêner la visibilité 1 le vent fort2 la neige3 la brume et la poussière4 les nuages ?
2 et 4.
Une question mal rédigée non relue je suppose que le pseudo rédacteur a utilisé une ia malade et qu'il n'a même pas pris la peine de contrôler les choix de réponseson va considérer que la neige au sol pourrait être soulevée par votre drone et que si on parle de la neige qui tombe cela va diminuer votre visibilité égalementcomme il n'y a pas la proposition n°2 seule on se rabattra sur la n°4 qui n'a pas grand sens car l'intitulé indique qu'on évolue proche du sol peut être qu'un jour ils corrigeront cette question si vous l'avez je veux bien que vous me confirmiez si les propositions ont été modifiées ou non d'avance merci et bon courage à tous4. 1 et 2. 1.
Question 85-18 : Une batterie qui a été endommagée pendant son transport ou lors d'un accident ?
Doit être soigneusement déchargée et éliminée dès que possible.
Il existe plusieurs méthodes pour la décharger elles varient en fonction du type de batteries nimh nicd lipo etc il existe des chargeurs qui ont une option de décharge sinon on peut utiliser une ampoule incandescente de lampe de poche 45 v à 9 v ou une ampoule de voiture 12 volts quant la lumière s'éteint votre batterie est déchargéeon préconise un bain d'une semaine dans l'eau salée pour neutraliser une lipo mais cette méthode doit être faite à l'air libre et sous surveillance l'idéal est de se rapprocher d'un centre de recyclage et traitement de matières dangereuses mais ce n'est pas toujours simple utilisez les boites dédiées aux piles et batteries dans les déchetteries après vous être rapproché du personnel à l'accueilPeut être réparée et utilisée à nouveau. ne peut être utilisée qu'une fois de plus. ne devrait pas être utilisée pendant 24 heures puis inspectée avant sa prochaine utilisation.
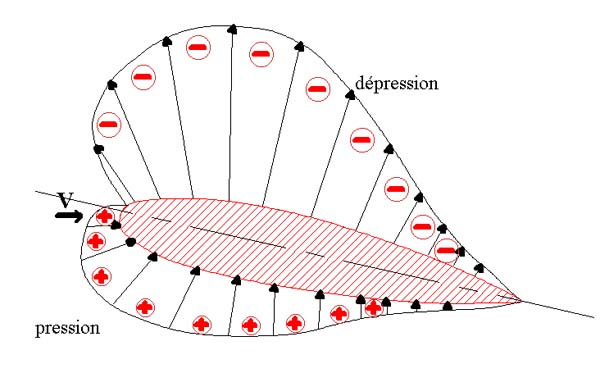
Question 85-19 : La force s'opposant au déplacement d'un aéronef en vol est appelée ?
La traînée.
La traînée s'oppose à l'avancement de l'aéronef en volla portance s'oppose au poidsLa portance. la surpression. la force aérodynamique.
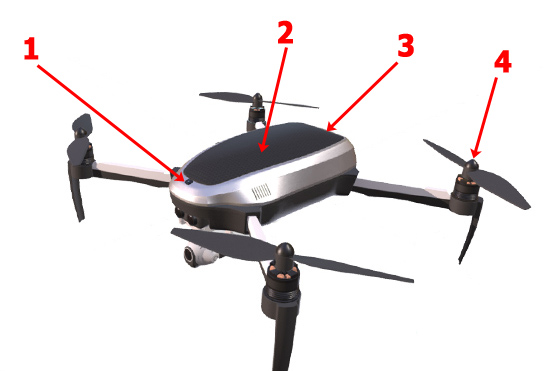
Question 85-20 : Le centrage d'un aéronef sans équipage à bord dépend du ou des paramètre s suivant s ?
Poids et répartition des charges transportées caméra équipement et des batteries.
Droits exclusifs réservés. Reproduction interdite sous peine de poursuites.